
Introducción
Un controlador (Driver) de motor es un pequeño amplificador de corriente; la función de los Drivers de motor es tomar una señal de control de baja corriente y luego convertirla en una señal de corriente más alta que pueda conducir un motor.
Un Driver es un sistema. Se espera que un Driver de motor típico, tenga un diagrama de bloques semejante al de la Figura 27.1. La carga puede ser un sistema de transporte, un sistema de tracción, los rodillos de accionamiento de un molino, la herramienta de corte de una máquina o herramienta numéricamente controlada, el compresor de un acondicionador de aire, un sistema de propulsión de barcos, una válvula de control para una caldera, el brazo de un robot, y así sucesivamente.

El bloque convertidor electrónico de potencia puede usar diodos, MOSFETS, GTO, IGBT o tiristores. Los controladores pueden constar de varios bucles de control para regular el voltaje, la corriente, el par, el flujo, la velocidad, la posición, la tensión u otras condiciones deseables de la carga. Cada uno de estos puede tener sus características limitantes intencionalmente colocados para proteger el motor, el convertidor o la carga.
DC Motor Drivers
Los motores de corriente continua (Motor DC) se utilizan ampliamente en sistemas de velocidad variable y sistemas de control de posición en los que se requiere una buena respuesta transitoria y un buen rendimiento en estado estable. Los ejemplos se encuentran en unidades robóticas, impresoras, máquinas-herramientas, laminadoras de procesos, industrias del papel y textiles, y muchos otros. El control de un motor de corriente continua es sencillo, principalmente debido a la incorporación del conmutador dentro del motor. El cepillo del conmutador permite que el par desarrollado por el motor sea proporcional a la corriente del inducido si la corriente de campo se mantiene constante. Por esto último, las teorías clásicas de control se aplican fácilmente al diseño del par.
El conmutador mecánico limita el voltaje máximo aplicable a aproximadamente 1500 vatios y la capacidad de potencia máxima a unos pocos cientos de kilovatios. Se utilizan combinaciones en serie o en paralelo de más de un motor cuando los motores DC se utilizan en aplicaciones que manejan cargas más grandes. La corriente de armadura máxima y su tasa de cambio también están limitados por el conmutador.
Los pequeños motores DC de tipo servo normalmente tienen excitación por imanes permanentes para el campo, mientras que los motores de mayor tamaño tienden a tener un suministro de campo por separado para la excitación. Los motores DC excitados por separado representados en la Figura 27.2(a) tienen excitación de campo fijo (corriente de campo if constante), son muy fáciles de controlar a través de la corriente de armadura ia que se suministra desde un convertidor electrónico de potencia.

Los convertidores Thyristor de ac-dc con control de ángulo de fase son populares para los motores más grandes, mientras que los conmutadores de voltaje On-Off, también llamados convertidores dc-dc de conmutación modulada de ancho de pulso (PWM – Pulse Width Modulation por sus siglas en Inglés ) son populares para las unidades de servomotor.
El motor de corriente continua excitado en serie tiene su circuito de campo en serie con el circuito de armadura, como se muestra en la figura 27.2(b). Dicha conexión proporciona un alto par a baja velocidad y bajo par a alta velocidad, una característica que puede combinar bien con las cargas de tipo de tracción.
Es buen momento para recordar el diagrama de bloques típico para un motor DC controlado por armadura (para un repaso ver Dinámica de una Sistema Electromecánico con Motor DC):

Cuando un sistema Driver controla la corriente de armadura a través de un convertidor electrónico de potencia, lo que realmente controla es el nivel de la relación velocidad-torque del motor, la cual se muestra en la Figura 27.3(a):

Convertidores para DC Drives (Power Electronic Converters)
Dependiendo de los requisitos de la aplicación, el convertidor de potencia para un motor de corriente continua (que en el diagrama de bloques de la Figura 27.1 está identificado como Power Electronic Converter) puede elegirse entre una serie de topologías. Por ejemplo, un convertidor de tiristor semicontrolado o un convertidor de conmutación PWM de un solo componente puede ser adecuado para un drive que no requiere desaceleración controlada con frenado regenerativo. Por otro lado, un convertidor de tiristor o transistor de cuatro cuadrantes para el circuito de armadura y un convertidor de dos cuadrantes para el circuito de campo pueden ser necesarios para un variador de alto rendimiento con un amplio rango de velocidad.
Convertidor de tiristor
Los tiristores se utilizan para construir la primera etapa de un Driver para motor eléctrico con el fin de variar la amplitud de la forma de onda del voltaje (Va en la Figura 27.2(a)) a través de los devanados del motor, como se muestra en la figura 3.35.
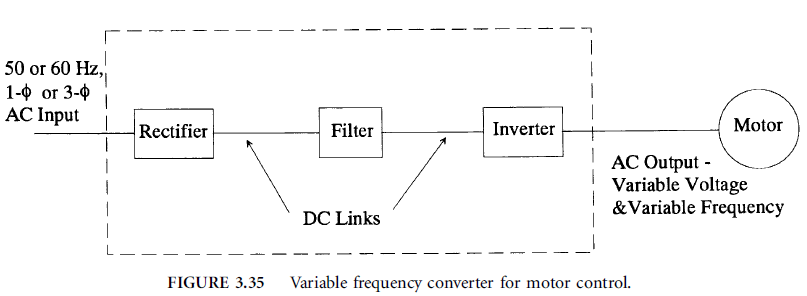
Las secciones del rectificador y del inversor pueden ser circuitos de tiristores. Se usa un rectificador controlado junto con un inversor de fuente de voltaje (VSI – Voltage Source Inverter) modulado por onda cuadrada o ancho de pulso (PWM) para crear el sistema controlador de velocidad-par. La Figura 3.36 muestra una onda cuadrada o PWM VSI con un rectificador controlado en el lado de entrada.

El interruptor del bloque inversor está hecho de tiristores (generalmente GTO – Gate Turn-Off Thyristor) para alta potencia. Los controladores de motores de baja potencia suelen utilizar inversores IGBT (Insulated-Gate Bipolar Transistor).
Pulse-Width Modulation

Una de las funciones básicas de la electrónica de potencia es la conmutación, el interruptor que apaga-enciende, conocido como Switcher. Podríamos entonces hablar de la Función Switching. Basándonos en la Figura 1.15, las funciones de Switching se pueden caracterizar por completo con tres parámetros:
- La relación de trabajo D (Duty Ratio): fracción de tiempo durante el cual el interruptor está en su posición de encendido. Para fines de control, el ancho del pulso se puede ajustar para lograr un resultado deseado. Podemos denominar este proceso de ajuste como modulación por ancho de pulso (PWM – Pulse Width Modulation), tal vez el proceso más importante para implementar el control en los convertidores de potencia, por lo cual será nuestro siguiente tema.
- La frecuencia fswitch : suele ser constante, aunque no en todas las aplicaciones. Para fines de control, la frecuencia puede ajustarse. Esto es inusual en los convertidores de potencia porque las frecuencias de operación a menudo son dictadas por la aplicación. (ω=2πfswitch; fswitch=1/T).
- El tiempo de retardo t0 o la fase Ø0 = ωt0: los rectificadores a menudo hacen uso del control de fase para proporcionar un rango de ajuste. Algunas aplicaciones especializadas de convertidores ac-ac usan modulación de fase
SIGUIENTE:
- Motor DC – Problemas resueltos de sistema electromecánico – Función T.
- Sistema de control de un motor DC en Matlab – PWM (Pulse Width Modulation)
- Ejemplo 1 – Función de Transferencia de Sistema Electromecánico
- Ejemplo 2 – Función de Transferencia de Sistema Electromecánico
- Dinámica de un Sistema Electromecánico con Motor DC
- Servomotores – Sistema de control de posición
- Servomotores – Respuesta transitoria de un sistema de control de posición.
- Sistema de control de posición con realimentación de velocidad
- Dinámica de un Motor DC – Diagrama de bloques – Función de Transferencia
- Función de transferencia del Motor DC y su carga
Fuente:
- Libro Rashid – Power Electronic Handbook
Revisión literaria hecha por: Larry Francis Obando – Technical Specialist – Educational Content Writer.
Mentoring Académico / Emprendedores / Empresarial.
Copywriting, Content Marketing, Tesis, Monografías, Paper Académicos, White Papers (Español – Inglés)
Escuela de Ingeniería Eléctrica de la Universidad Central de Venezuela, Caracas.
Escuela de Ingeniería Electrónica de la Universidad Simón Bolívar, Valle de Sartenejas.
Escuela de Turismo de la Universidad Simón Bolívar, Núcleo Litoral.
Contact: Ecuador (Quito, Guayaquil, Cuenca) – telf +34633129287
WhatsApp: +34633129287
email: dademuchconnection@gmail.com

1 comentario en “Driver de motor DC – Electrónica de potencia”